

VicPy | 프로젝트 - 움직이는 레이저 장난감 만들기
본문
※ 영상을 선명하게 보기 안내
- 유튜브 영상에서 오른쪽하단에 톱니바퀴를 클릭합니다.
- 팝업목록에서 "품질" 선택하세요.
- 원하는 해상도를 선택해주세요.
※ 모바일에서 Wifi가 아니라면 데이타가 소진될 수 있으니 주의바랍니다.
VicPy님의 아두이노강의 청각장애인을 위한 자막
de 5
안녕하세요 여러분 이번 시간에 아두이노를 이용해서 재미난 장난감 한번만들어보려고 하는데요
바로 이제 여러분들이 좀 더 쉽게 이해할 수 있도록 1
사제는 보여드리도록 할게요
이런 레이저 포인트를 여러분들 아마 많이 보셨을 거에요 그런데 이런
레이저 포인트가 싼것 같은 경우에 문방구 남 편의점 같은데서 천원짜리
싸게 파는 것들이 많아요 근데 그런 레이저 포인터를 사서 아내를 분해
보시면은 이렇게 앞에 빨간 레이저를 쏘는 뭐 손은 그 장치 부분만 따로
빼 셔서 사용하실수가 있어요
그래서 바로 이번 시간에는 그 레이저 포인터와 아두이노 에서 이제 서버
모터 앙두이노를 연결해 가지고 참 재미난 장난감을 한번 만들어
보도록 하겠습니다 그래서 한번 실제 만든 것을 보고 한번 시작해 보도록
하겠습니다
지금 보고 계신 게 우리가 이제 이번시간 만들려 하는 작품인데요
지금 이제 서버로부터 2개를 이용했구요 위의 이제 레이저 포인트
여러분들이 이제 화면에 여기 보이시는 이 부분이 레이저 포인터 에서
레이저 쏘는 부분만 있을 때 내가 지고 여기다 이렇게 부착을 시킨 거에요
그래서 여러분들 이제 led 온오프 시키는 것처럼 여기에 담아 이제
똑같이 사용하시면 되요
플러스 마이너스 해가지고 하시면 되고 지금 같은게 이제 움직임 하는데
이제 전원을 좋아좋아 만 내적 이런식으로 발사되어
이런 식으로 할 수 있고 그 난 집에 고양이나 강아지 키우시는 분들 같은
경우에는 이렇게 만들어서 고양이나 강아지 장난감 용도로도 이렇게
사용하실수가 있어요
이번시간 바로 만들려는 게 방문 전에 보여드린 이 레이저 사랑 난감 인데
바로 여러분들이 컴퓨터 마우스를 이용해서 이레이저 장난감을 한번 조정하는
것을 한번 해보도록 하겠습니다
지금 보시면은 아래 sur ma 있는데요
웹 페이지로 이동하면 이와 같이 표시가 되어 있어요 그래서 여러분들이
3d 프린터를 가지고 계신다면 은 여기서 이제 3g 모델을 다운로드 하셔
가지고 뽑으신 다음에 만드실 수가 있는데 여기 같은 경우에 씽 파이즈
라고 표시된 거 보시면은
지금 파일이 3개가 있어요 그래서 이제 여러분들이 출력해야 되는 몸통
부분 이제 세 군데가 돼 있기 때문에 가까이 제 3개를 다 다 운로드
하신다음에 출력하시면 되구요
만약에 집에 3d 프린터 없는 분 같은 경우에도 스티로폼 이나 아니면
박스 같은 걸로도 이런 비슷한 거 를 만드실 수 있으니까 는 일단 먼저
설명드리도록 하겠습니다
그래서 이제 지금 여기 위에 보이시는 3개는 앞서 지금 설명드렸던 3d
프린터 모델을 출력한 거에요 그래서 이게 지금 abc 라고 표시했는데 a
가 지금 서버 밑에 지지되고
두번째 비가 위에 있는 서버 트 지지되고
이제 세 번째가 이제 레이저 포인터
여기요 쪽에 다 과한 레이저 포인터를 이제 연결 하는 거죠
한 다음에 레이저 포인터로 이제 해가 지고 하는지 시대입니다
좀 다음에 저희가 하나씩 하나씩 살펴보면 은 먼저 아까 a 라고 설명
드렸던 밑에 부분 지지대 부분에 다가 서보모터 이렇게 깨어있기 어요
지금 같은 경우에는 이 모델의 딱 맞게 설계가 되었기 때문에 대개 아마
여러분들이 가지고 있는 미니 서보 같은 경우에 크기가 다 거동 일 하실
거에요 오늘 느끼 우신 다음에
나사로 여기를 이렇게 홈 홈이 있기 때문에 나서 이렇게 쪄주세요 그러면
이제 고정이 되구요
그 다음에 2위 거 같은 경우에 이제 b 밑부분에 보시면 이렇게 그 바로
이제 홈이 있는데 이 부분을 글루건을 통해서 지금 써보면 또 쪽에 보시면
패키지를 보시면은 이렇게 축이 하나 있어요 이길 단축이 그래서 이거를
글로 번과 함께 부착을 시켜 가지고 b 에다가 bb 이쁜 밑부분에 다가
연결해주세요
그 다음에 이제 연결이 돼서 굿 없으며 는 이제 b 부분의 다가
마찬가지로 이제 위에 써 본 버터를 연결 해 주시고
앞서 a 에서는 똑같이 나사로 이렇게 조여서 고정을 시켜주세요
고정에 완료 되셨으면 은 그 다음에 이제 여기 이제
레이저 포인터 부분인데 레이저 포인터 부분에 이걸 이제 이쪽에 나가는
마찬가지로 반쪽짜리 축을 여기다가 글루건으로 연결해서 붙여 주시구요
그 다음에 이 부분에 다가 레이저 포인터 오늘 달아주세요
그래서 선이 - 홈 플러스 선이 여 쪽으로 이렇게 나올 수 있도록
혹시나 지금 이 레이저 포인터 같은 경우에는 저같은 경우에 이거를 레이저
포인터를 분해를 해 가지고 필요한 부분만 잘라서 나 때문 했는데
어린이 여러분들은 이제 본인들이 직접 하지 마시고 어른들한테 부탁하신
다음에 그 짤라 낸 다음에 납땜을 해서 이렇게 한번 사용해보시기 바랍니다
그 다음에 이제 비아 시를 이제 서로 맞춰 주시기 바랍니다
지금 같은 경우에 따는 각도는 무시하고 요
b 아 싫어 이렇게 맞춰주세요 각도 맞추는 것은 나중에 이제 제가 다시
설명해 드릴 거에요 그래서
b 하시는 씨를 이렇게 깨어 주셨는데 주의 하실 점이 너무 이제 3d
프린터 같은 경우에는 강도가 그렇게 강하지 않기 때문에 잘 못하는 풀어줄
수가 있어요 그래서 최대한 조심스럽게 가지고 깨어 주시고요
아마 지금 같은 경우에 여기를 먼저 끼 우신 다음에 그 다음에 여기 서보
모터 축 부분을 연결해 주시면 될 거에요
그 다음에 위해 연결이 완료 됐으며 는 아래 몸통 쪽에 다이제 깨워주세요
이렇게
끼워주시면 은 완료가 된거고
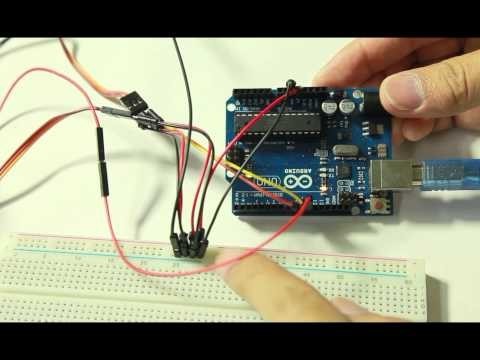
이제 회로를 연결을 해야 되요 그래서 페러 같은 경우에 앞서 설명
드렸다시피 서머 모터 2개랑 레이 소 포인터 하나가 필요 합니다
어 회로도를 한번 살펴 보면요
여기 여기를 보면요 지금 맺어 폰트는 보면은
좀 회로를 연결을 했죠 그래서 지금 같은 경우에 여기서
아두이노 쪽에 o 볼트 랑 그리고 그라운드 부분을 열중 에 연결을 해
주시고요
그 다음에 여기에는 각각 서보모터 랑 그리고
레이저 같은 경우에는 이제 파워는 필요없지만 은 그라운드 연결 해야 되서
이렇게 그라운드 연결 했구요 지금 같으면 서버 노턴 각각 이제 파워 랑
그라운드 연결을 해야 되서요 게다가 이렇게 연결 해 놨어요
파워 그런데 파워 그런데 이렇게 용된 왔고
여기서 9 10 11 순서대로 9번 외 이제 여러분들이 목을 좌우로
움직이는 역할은 써보고 터 명 들었고 그 다음에 노란색 부분에는
목을 위아래로 하는 써 모터를
그 다음에 마지막 11번의 바로 재 맺어 를 연결 했어요 만약에
여러분들이 매니저가 없어서 led 를 대신 02 했다면 led 가 많 야
이걸 통해서 거 다 펴지 겠죠
그래서 만약 여러분들이 정상적으로 연결을 완료했다면 아마 제가 여기
보여드리는 사진과 같을 거에요 그래서 이런 식으로 보실수가 있구요
그다음 이자 아두이노 코드 한번 살펴보도록 하겠습니다
아두이노 코드는 전에 이제 서보모터를 많이 사용해 보셨으니 까는 아마
다들 아실 거에요 그래서 먼저 서보모터 라이브러리를 추가를 해 주시고요
여기서 서버 변수를 선언해 주신데
2개를 됐어요 호라이즌 트리 랑 버티컬 이라고 했는데 얘가 바로 호란
센트리 목을 좌우로
제어 하는거구요 버티컬 이제 몹을
위아래로 제어하는 서브 노트 해당 되요 그 다음에 레이저의 해당되는 것은
매크로 상수 통해서 메이저 나고 이제 선언을 해 놓았구요
그 다음에 여기서는 이제 9번을 이제 써보면 터 초 그 설정 아는거 서브
마트 10번을 설정 하는거 그 다음에 핀 번들에 가지고 레이저를 껐다
켰다 할 거니까 는
예 출력 출력 모드 9 후 서로 설정을 했죠
그 다음에 우리가 여기 사두이노 이거 를 연결한 내 적은 장난감 은
시리얼 통신으로 제어 할 것이기 때문에 여기서 이제 싫어할 에 해당되는
시리얼 비긴 부천 6대
모드 레이트 설정 해 줬구요 그 다음에 루프로 오시면 은 이제 실제로
이제 시리얼 상대방 쪽 만약에 pc 쪽에서 아니면은 따른 씨를 통해 않은
쪽에서 데이터를 보냈으면 그때 져 발생하는 이벤트죠
그때 발 발생한 이벤트의 왔었을 때 이와 같은 코드들이 이제 돌아가는
건데 뒤에 상세설명 한번 해 드리고 다시 한번 설명 드릴께요
그럼 여기 보시면은 여러분들이 처음 보는게 나오는데
씨리얼 8 3 인텔 하는게 나아요 이게 뭐냐면 은
만약에 여러분들이 이제 외부에서 ppc 예로 들어 가지고 여러분들 pc
를 연결해 쓸 때 pc 에서 시리얼로 통 데이터가 날라 오잖아요
거기서 이제 여러분들이 일일이 글자를 확인하고 잊은 인내의 숫자를
걸러내고 하실 수 있는데 좀 더 편하게 하시라고 이제 8 세인트 라는
이제 명령어가 있어요 그래서 2 8 3 인 트 라는 것을 하면은
만약 며 그 그쪽에 상대방 쪽에서 숫자 형태로 데이터가 날라오는 알아서
자동으로 고른
숫자를 숫자만 잘라내 가지고 사용 나한테 알려 주는 거에요 아두이노 한다.
알려주는 거
이거는 이제 아두이노 쪽에서 보면서 알려 드리도록 하구요
그리고 그 다음에 이제 보시면은 원래 서보 모터를 제어할 때 라이트 라고
해가지고 각도가 벽에서 180도 팥을 했는데 여기서는 라이트가 아니라
라이트 마이크로 세컨드 라고 표시를 된거예요 처음부터 의아해 하실 텐데
이 라이트 마이크로 세컨드 같은 경우에도
앞에 라이트 랑 마찬가지로 각도를 제어 하는거예요
단지 좀 다르다는 것은 앞에서는 라이트가 0 에서 180도 사이에 그
값도 값으로 하는건데
이 라이트의 마이크 로스 세컨즈 는 바로 이제 마이크로 세컨드 라는 이
단위 수로가 통해서 박도 를 조절하는 거예요
여기에 이제 마이크로 세컨드 부분에 h 라고 역은 적혀있지만 은 이
부분에 이제 마이크로 세컨드 의해 막내는 값이 들어왔는데
일단은 2 lit 마이크로 세컨드 의 기본 단위의 범위는
최소가 54최대 2400 얼 설정되어 있어요 그래서 서버 모터 마다
각 제조사마다 이제 차이점이 있긴 하지만 은 대개 일반적으로 쓰는 서브
노트 의 경우 54이코 세컨드 가 영도
2402 180도 기 때문에 이렇게 설정을 했구요
바로 이제 이 마이크로 세컨드 통해서 이제 각도를 조정하는 데 이
마이크로 세컨더리
이용을 하면 또 하나 좋은점이 뭐가 있냐며 는 그걸 아이트 같은 경우에서
182 지 많은 여기서는 이제 마이크 3 펀드 54에서 2402
때문에 좀더 이제 세밀하게 각도를 조정할 수가 있어요
그래서 지금은 이제 세밀하게 조정하기 위해서 라이트 마이크로 세컨드 를
사용한 거고요
다시 앞으로 돌아가서 이제 코드를 다시 보시면
마차 맞을 시리얼 이벤트가 있고 여기서 씨리얼 8 세인트
실험 8 수인이 이렇게 연습 쪽으로 표시가 되어 있죠 그래서 여기 같은
것은 앞에 있는 이제
글자를 앞에서 인 트 형의 있는 데이터를 긁어서 h 에 놓고 또 그
다음에 인 트 0 의 데이터를 찾아서 넣고 그다음에 인 태형의 데이터를
찾아서 넣고 일단 지금 설명을 하더라도 감이 안 잡힐 거야 세요 코드를
설명드리고
그 아들의 너를 통해서 설명을 드릴께요 그 다음에 이제 8 센터를 통해서
값을 넣어 쓰면 그 다음에 마지막으로 익혀진 캐릭터 져 한 바이트가
이렇게 개행 문자로 하죠
이렇게 n 이렇게 슬러시 에서 n 자 모양 기호 랑 비교를 해서 개행
문자 라면은 그때 이제 여기는 코드들이 실행 돼서 각도로 움직여라 라고
표시가 되어있어요
그래서
좌우로 제안은 서봉 태 각도를 마이콜 세컨 이고 해가지고 저하고
마찬가지로 위아래 각도 제어 하고 그 다음에 이제 l 각 망해 값에
따라서 레이저 를 조정하도록 되어 있어요
실제 한번 해보도록 하겠습니다
코드 하나 있는데요 지금 시력 이미지 업로드를 되어 있기 때문에 시력
모니터는 보시면은
제가 여기서 이제 아까 8 센터 라고 설명을 들었잖아 요
지금 같은 경우에는 제가 0에서 180도까지 서버로 제어를 할 수 있지만
은 원래는 영웅에서 180도를 제어를 하는 게 아니라 0에서 100
20도를 제어를 하도록 했어요 그래서 만약에 그
좌우로 움직이는 게 현재 0에서 120도 인데
60도 를 설정해주면 은 정면을 바라보는 거고
마찬가지로 래 를 설정 하는 것도 120도 설정할 수 있는데
베이 10도에서 60도 를 설정하면 은 위아래 설정한 게 바로 정면을
바라보도록 그런 식으로 설정해서 60도 가 중심을 바라보도록 설정 했고요
그게 바로 이제
조이제 원래 마이크로 세컨드 기준을 하면은
500에서 1800 이에요 이 서버는 탕아 그래서 502 0
그 다음에 1800 의 이 서보 모터는 제가 사용하는 게 1802
120도 에요 그래서 이걸 통해서 사용했고요 그래서 지금 만약에 제가
이제 60도 정중앙을 받아 본다면 은
첨 150 을 설정하면 60도 가 되거든요 그래서 지금 다시 돌아와서
아두이노 조금 보시면은
여기서 제가 위아래 자우 를 60도 록 진리로 금 등 내보고 이렇게
설정을 하고요 지금 제가 레이저 를 끄고 싶으면 0
펴고 싶으면 1 이렇게 보내면 되요 근데 지금은 일단 영어로 하고 여기서
이제 모니터가 이제 여기서 뉴 라인 으로 설정해 주세요 그러면 이제
마지막에 갱이 들어가거든요
그래서 영을 하고 엔터를 치시면 은
각도가 바뀝니다 이걸 찍고 있는 예 각도 밖에 마찬가지로 다시 한번
해볼게요
그래서 이번에는 1500 정도 하고
일로 하면은 각도가 이렇게 바뀌면서 레이저가 켜지 줘 다시 4절을 거
볼게요
그럼 바로 제가 파스 인티 라고 설명해 드렸는데 이 파스 인 트 가
이렇게 이런식으로 잡으며 는 여기다 적어 드릴께요
데이터가 상대방 쪽에서 이런식으로 날라 온다고 해서 가정을 하는거예요
그래서 8 세인트 라는 여기까지 1500 까지 잘라내 가지고 있고 또 8
세인트 또 출하 면은 역 2005 배까지 찾아서 읽고 토 8 스 인 트
를 호출하면 은 뒤에 숫자 0 까지만 잘라내서 넣고 그래서 이 숫자들이
순서대로 1,500 1,500 0
hv 엘의 들어간 다음에 여기서 각도를 설정할 때 그 값들을 해당되는
만큼 각도가 조절되고 레이저가 온 오프가 되는거예요 그걸 이용해 가지고
있어 제어를 하는 거고요
다음으로 넘어가시면 은
이제 그러면 여러분들이 이거죠 할 때 일일이 12월 모니터에서 이제
설정을 해서 하실 수 없잖아요 그럼 너무 불편 하잖아요 그래서 바로 이제
이레이저 장난감을 제어하는 것을 이제 프로세싱을 이용하는데요
프로세싱 코드를 바로 한번 보도록 할게요
그래서 프로세싱 같은 경우에 여러분들마 아들이 너란 프로세싱 속에서
보였으니까 는
시리얼통신 할꺼니까 프로세싱 시리얼 이라고 표시 했고요
그 다음에 시리얼 마이 포트 그 다음에 보시면 이제 3 덕분에 그냥 참
크기 10105 로 했구요
여기 보시면 이제 익숙하실 줘 시류에 연결된 기기들 보고 그 다음에
시리얼 연결되기 위해서 첫번째꺼 연결되도록 9600 보드 레이트 로
여기서는 뒤 로우 그 함수를 사용하지 않아요 그래서 이제 일단 b1
왔구요
다음으로 이제 마우스 모드 랑 마우스 드래그 다 있는데 이 마우스 모브
덜한 마우스 드래그 같은 경우에 3 섭섭 어 라는 함수를 호출 해요
이제 변수를 0 아니면 일로 전달해주는 그런 차이가 있는데 3 서 벗
서쪽으로 한번 살펴보시면 은 여기 보시면은 이제 인 트 냄
이제 마우스 x 이렇게 보이시죠 여기 보시면은 이제 하나씩 한 번
살펴보게 여러분들의 맵 함수 부셔 짜 나요
맵 함수 같은 경우에 기존의 그 값이 소속돼 있는 범위가 있다 만에 그
범위를 다른 범위로 변경 해서 그 범위 다른 범위에 있는 값 처럼 다시
그 기준 값을 변경한다. 고 설명을 들었죠
그래서 여기 같은 경우에 0 2802 되고
위드 의해서 400 이니까 402 502 되는 시골에서 2 마우스 x 의
값을 변경해 줘요 그 다음에 마우스와 이도 변경 해 주어요
그렇게 해주고 2 발이 1800 가 500 이 값들은 바로 서버 노트에
각 각도 해당되는 값이 0
아까 마이크로 세컨드 설명하면서 그 다음에 거기서 구해지면 은 h 부위
이래 여기다 넣어주고 스페이스 v 넣어주고 스페이스 한다.면 레이저는
여기서 받은 변수를 매개 변수를 왜 넣어준 다음에 갱 등 계획 문자
여기에다 추가를 해 주신 다음에 저 아두이노 쪽에 더 전송을 하는 거예요
앞에도 실험 모니터로 하는거랑 동일한 명령어로 이제 보내게 되는 거죠
그런 실제 다시 한번 확인해보도록 하겠습니다 프로세스는 이동 하신 다음에
이렇게 실행을 하시면 은
이렇게 화면이 뜨죠 마흐무드 같은 경우에는 레이저가 온 오프가 되어 있지
않아요
그래가지고 움직임 안하다가 만약 제가 이제 버튼을 누른 상태에서
드래그하면 은
레이저가 나가죠
그래서 만약에 이제 여러분들이 이제 좋아 여러분들이 집에 있는 모 친구들
안테나 아니면은
고양이나 강아지 같은 강아지한테 이렇게 레이저를 어디다 고정시켜 놓은
다음에 발사하면서 이렇게 장난 쯤에서 놀 수가 있어요
또 하나 붕 그만 점마 생길 수가 있는데 지금 앞에 보시면은 지 그
아들인 온도 시리얼로 딱 설정을 했고 그리고
프로세스의 인도 시리얼 라이브를 사용 했잖아요 근데 아마 이런 의문이
드시는 분들이 있을 거예요
이전에 그 프로세싱 이랑 아두이노 수업을 할 때 분명히 아두이노 쪽에
덮어 맡아 를 설치하고 프로세싱 에서 아두이노 라이벌 을 설치에서 서버를
제어 했는데 왜 여기서는 그런 식으로 제어를 안했나요 물어보시는 분들이
있는데 바로 이제
그거는 이제 그 다음 가기 때문입니다 왜냐하면 은 이번 시간에는 컴퓨터를
이용해서 이제 제어 했지만 은 그 다음 시간에는 한번 이제 스마트폰을
이용해서 있어 보이 레이저 장난감을 제어해 부는 것을 이제 설명 드릴
거에요
따라서 이제 포즈도 이런식으로 작성한 거구요 그래서 다음 시간에는 이제
좀 더 이것을 업그레이드 해서 한번 해 보도록 하구요
이번 시간은 여기서 마치도록 하겠습니다 감사합니다
댓글 0개
등록된 댓글이 없습니다.